Coaxial 3P Joint
2021
Research project
Coaxial 3P Joint is a research project while working as a Mechanical Engineer/Designer in the Robotics Team at Gentle Monster Lab.
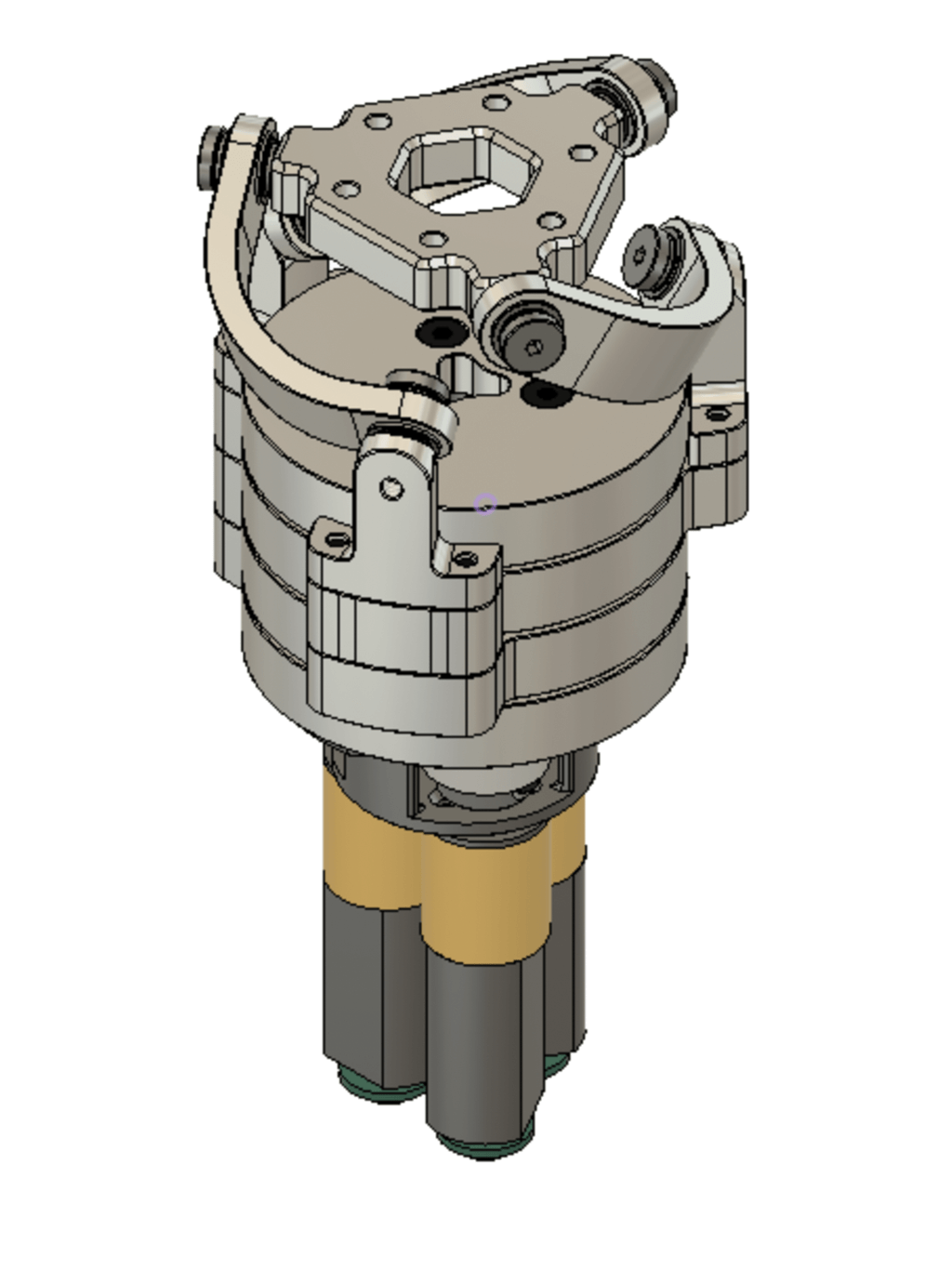
The team was quite versed in designing conventional animatronics and humanoids, most of which consisted of serial mechanisms. This project was to test whether we could introduce a parallel mechanism joint to replace a traditional serial joint. I confirmed we could use this mechanism in future projects, such as a humanoid’s wrist or neck joints.
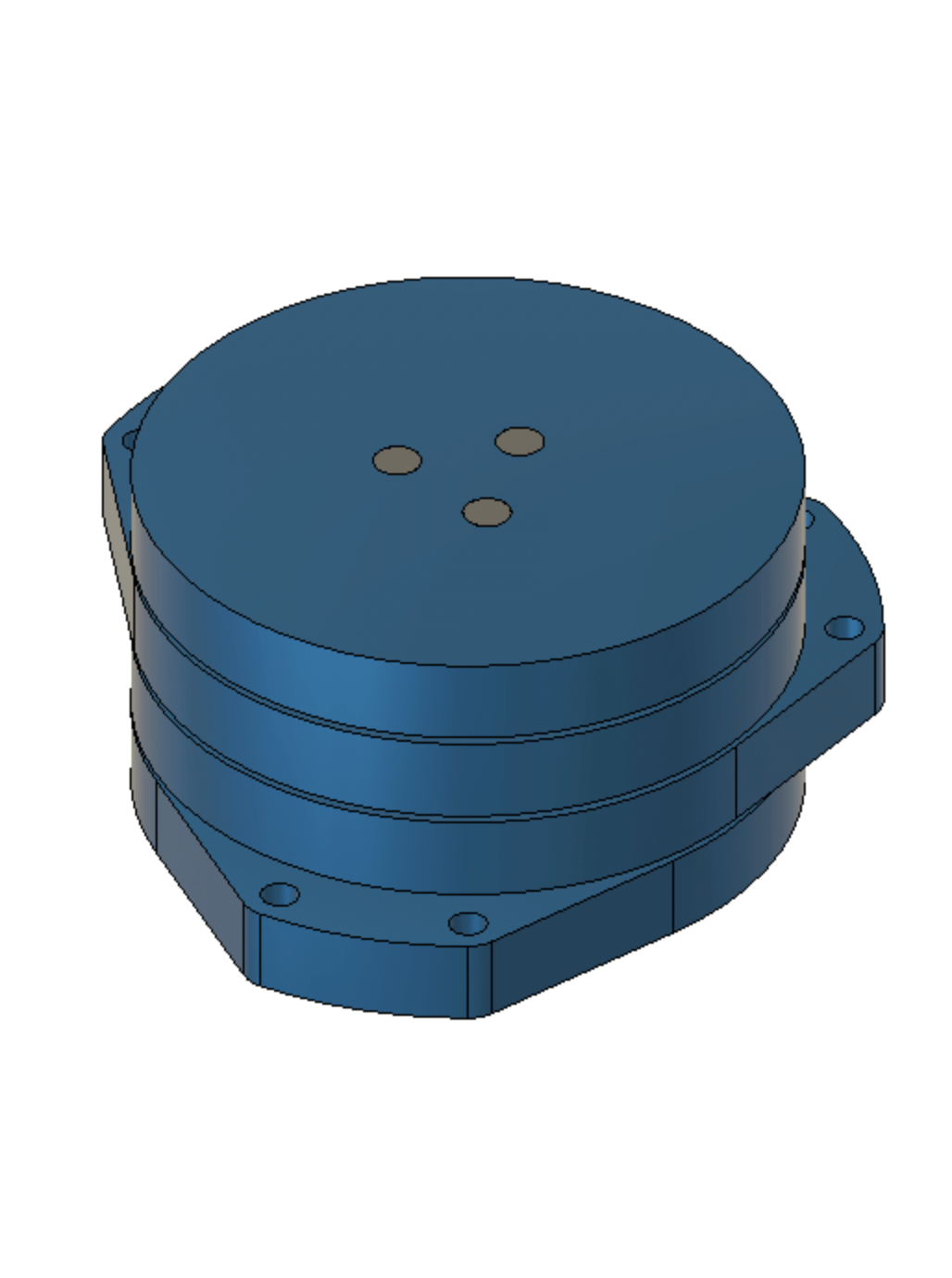
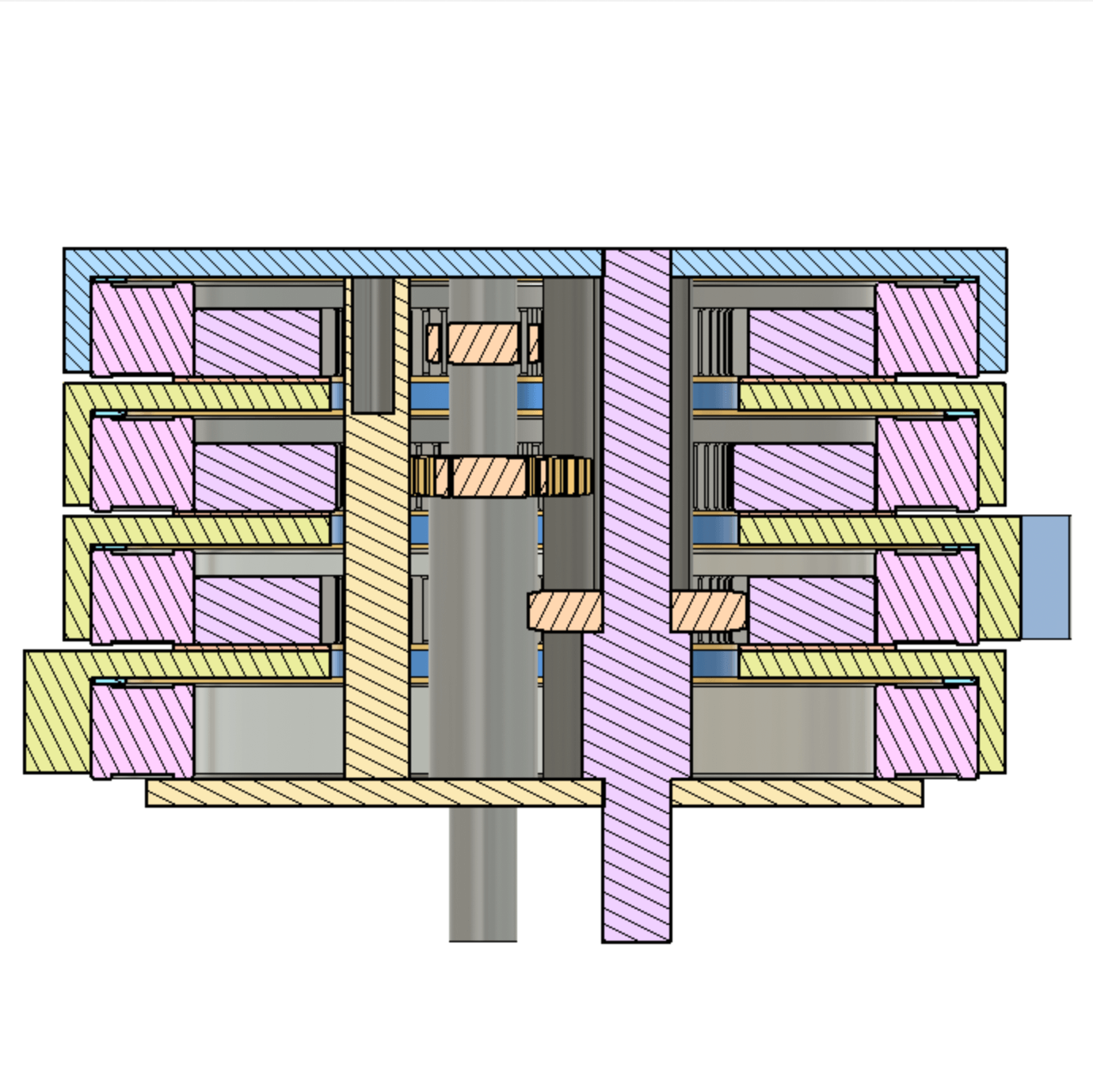
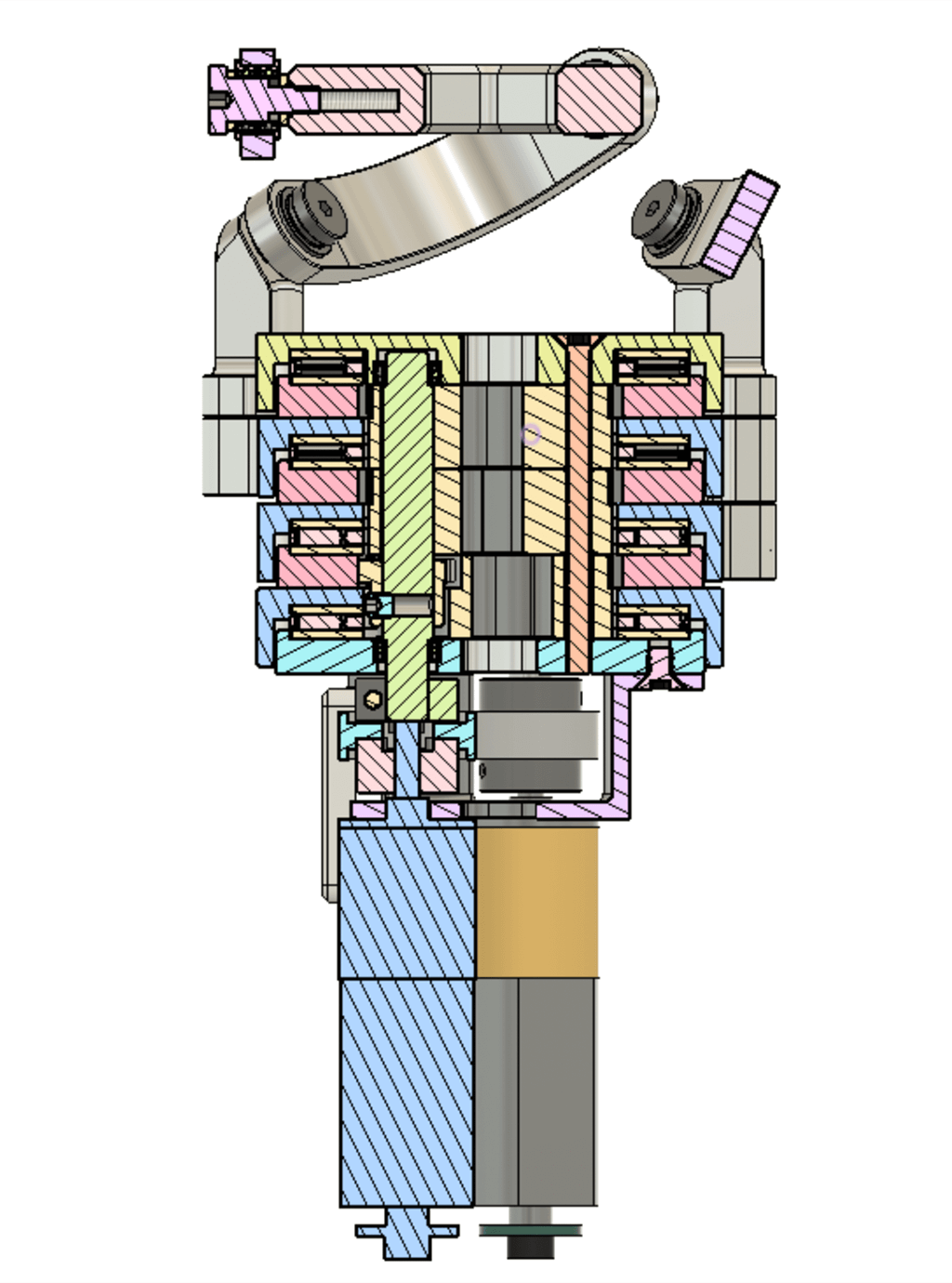
I designed the components to accommodate standard mechanical parts (such as bearings and shafts) and be effectively produced with aluminum machining, although the actual prototyping was done with 3d printed parts.
Three parallel DC motors were controlled using Arduino Mega, connected to a computer via serial communication. I also developed a control & monitor panel with Processing to control the whole system.
Contribution
- Overall hardware design (100%)
- Position control of DC motors with incremental encoders (100%)
- Building control & monitor panel using Processing (100%)
Tools & Skills
- 3D design : Fusion 360
- Fabrication : 3D printing
- Software : Arduino, Processing
References & Libraries
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}